
共计 5054 个字符,预计需要花费 13 分钟才能阅读完成。
## 1. 前言:星链为什么离不开GPS?
星链(Starlink)是目前全球规模最大的低轨宽带卫星通信系统,地面终端采用相控阵天线实现电子波束扫描。然而,星链通信系统在工程实现上对GPS存在两个层面的强依赖:
- 相控阵天线需已知自身位置,然后才能计算精确指向高速运动的低轨卫星,
- 上行链路时分多址(TDMA)通信协议依赖纳秒级时间同步,而该同步由GPS授时提供。
乌克兰战场曾出现典型案例:俄军对前线区域实施高强度GPS干扰,导致大量民用星链终端因无法完成初始对星和帧同步而失效。
**那么,星链终端能否在完全失去GPS信号的情况下,仅依靠自身接收的星链下行信号实现自主定位?**
答案是肯定的。而且实现路径不止一条,技术复杂度和精度各有差异。
最直接的方式:如果星链卫星能够像GPS卫星一样,单向广播星历、时钟修正数这类的信息,那么地面星链终端就可以直接接收这些信息完成定位,原理就跟GPS定位的原理一样。
如果在卫星星座不变,终端硬件不变的条件下,有没有可能只通过升级固件实现终端的自主定位呢?
本文聚焦其中**工程实现最简单、对硬件改动最少**的一种方法——**单颗卫星多历元多普勒定位**,

## 2. 单星多历元多普勒定位原理
### 2.1 卫星飞行产生的几何多样性
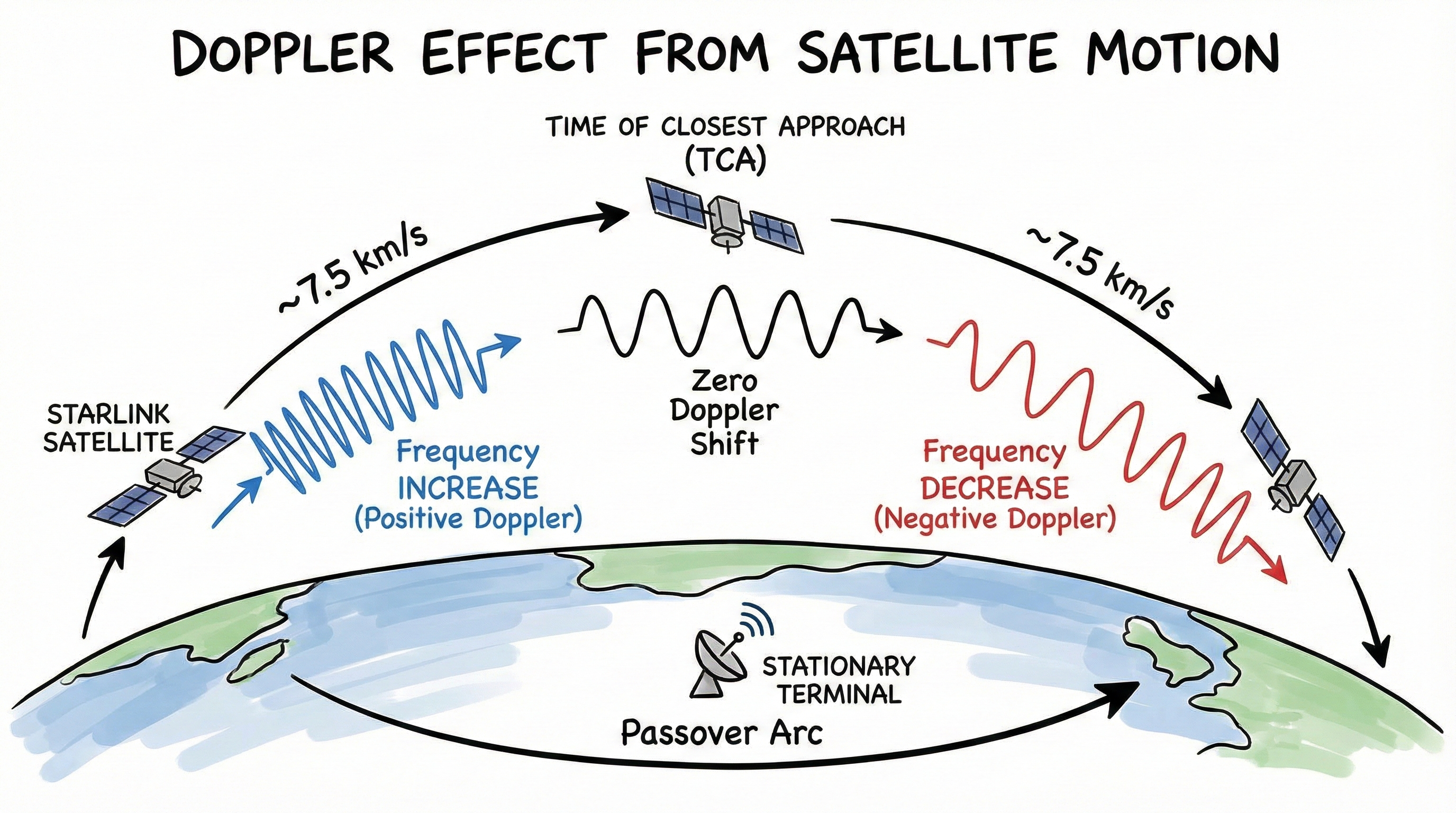
低地球轨道(LEO)卫星以约7.5 km/s的速度高速飞行。当一颗卫星从地平线一端飞向另一端时,其与地面终端之间的相对几何关系持续、快速地变化。这种变化直接体现在接收到的信号频率上,即**多普勒频移**。
- 过境初期(接近阶段):卫星向你疾驰而来,观测到的频率远高于发射频率(正向频偏最大),
- 过境中期(最近时刻,TCA):当卫星飞到离你最近的点(Time of Closest Approach),相对径向速度瞬时为零,多普勒频偏穿过零点,
- 过境末期(远离阶段):卫星远去,观测频率低于发射频率(负向频偏最大)。
### 2.2 多普勒观测方程
设地面终端位置为 r_u = (x_u, y_u, z_u),假设终端静止。在时刻 t_k,卫星的位置 r_s(t_k) 和速度 ṙ_s(t_k) 可通过TLE(两行轨道根数)计算得到。
终端到卫星的距离为:
d_k = ‖ r_s(t_k) - r_u ‖
从终端指向卫星的单位方向向量为:
r̂_k = [ r_s(t_k) - r_u ] / d_k
终端观测到的完整多普勒频移 f_{d,k}^{obs} 由以下几部分构成:
f_{d,k}^{obs} = - (f_0 / c) × ( r̂_k · ṙ_s(t_k) ) + δf_u - δφ̇_s(t_k) × f_0 + ε_k
其中各参数含义如下:
- f_0: 卫星发射的载波频率(Ku波段,约11.325 GHz)
- c: 光速(3 × 10^8 m/s)
- r̂_k · ṙ_s(t_k): 卫星速度在视线方向上的投影(径向速度)
- δf_u: 终端本地振荡器(LO)的频率偏差(Hz)
- δφ̇_s(t_k): 卫星晶振的频率偏差(无量纲,如ppm)
- ε_k: 多普勒测量噪声(Hz)
最大多普勒频移量级:
f_d,max = (f_0 × v_r,max) / c = (11.325×10^9 × 7500) / (3×10^8) ≈ ± 283 kHz
### 2.3 未知数分析
在理想情况下,若卫星钟频偏 δφ̇_s 在整个过境期间为常数,则其与终端本振频偏 δf_u 可合并为一个总的未知频偏项 δf_total = δf_u - δφ̇_s × f_0。此时,待求解的未知数向量为:
X = (x_u, y_u, z_u, δf_total)
共**4个未知数**。
每个历元的多普勒观测提供一个方程,理论上4个历元就可列方程求解,但这在工程上**远远不够**,原因在于几何可观测性。
### 2.4 为什么解算需要卫星的整个过境弧段?
虽然4个方程在数量上足以求解4个未知数,但**方程的质量**(即几何构型)远远不足以解算方程。
几何精度因子(GDOP)是衡量定位几何构型优劣的关键指标。**H**是多普勒观测方程构建的矩阵,多普勒定位的 H 矩阵取决于速度矢量的几何变化率。
GDOP定义为位置协方差矩阵迹的平方根:
GDOP = sqrt( tr[ (H^T H)^{-1} ] )
GDOP值越小,几何构型越好,定位精度越高。
在卫星过境初期或末期,卫星仰角很低,其运动方向与终端-卫星连线的夹角变化缓慢。此时,连续多个历元的多普勒观测值提供的信息高度冗余,观测方程组接近病态,导致方程解的不确定性极高,即使微小的测量噪声也会被放大成巨大的位置误差。
随着卫星从地平线升起,飞越天顶,再落向另一侧地平线,其相对于终端的方位角和仰角发生巨大变化。这使得不同历元的视线向量 r̂_k 在空间中充分分散,极大地改善了观测矩阵 H 的条件数。
> 单星多历元多普勒定位必须积累整个过境弧段(约8–12分钟)的观测数据,才能获得稳定收敛的位置解,在此期间,可观测的卫星仰角变化需超过60度。仅靠过境弧段的少数几个历元,几何约束严重不足,方程组病态,求解无意义。
### 2.5 求解方法
一旦获得足够长的观测序列,可采用以下两种主流方法求解:
1. **加权最小二乘(WLS)批处理**:在卫星过境结束后,一次性处理所有观测数据,通过迭代线性化(如高斯-牛顿法)求解非线性方程组,得到最终位置估计。
2. **扩展卡尔曼滤波(EKF)实时递推**:在卫星飞行过程中,每收到一个新的多普勒观测值,就实时更新位置和频偏的状态估计及其协方差。EKF的优势在于能实时反映定位精度的提升过程,其协方差矩阵 P_k 随着卫星飞越而持续收缩。
**关键结论:等待完整过境弧段并非算法缺陷,而是由物理几何决定的必要条件,目的是积累足够的、方向各异的几何约束以克服病态性。**
## 3. 定位精度的决定因素
### 3.1 多普勒测量噪声
星链Ku波段载频约11.325 GHz,多普勒测量精度取决于相干积分时间和信噪比,典型值约**0.1–1 Hz**。对应等效径向速度测量精度:
σ_v = (c × σ_f) / f_0 = (3×10^8 × 0.5) / (11.325×10^9) ≈ 13 mm/s
多普勒测量噪声本身处于毫米/秒量级,对定位精度的贡献相对较小,**不是主要误差源**。
### 3.2 卫星轨道误差(TLE精度问题)
商业可用的卫星轨道数据来自公开TLE(两行轨道根数)文件,更新频率约每天1–2次。TLE的精度特性:
- **位置误差**:数十至数百米(TLE发布时刻(Epoch),典型值100–500 m)
- **速度误差**:约 0.1 m/s 至 1.5 m/s
对多普勒定位而言,关键在于**速度误差**。等效多普勒频率误差:
Δf_TLE = (f_0 × Δv) / c = (11.325×10^9 × 1) / (3×10^8) ≈ 37.75 Hz
对应等效定位误差(依赖GDOP):
σ_pos,TLE ≈ GDOP × (c × Δf_TLE / f_0) × (d / ‖ṙ_s‖)
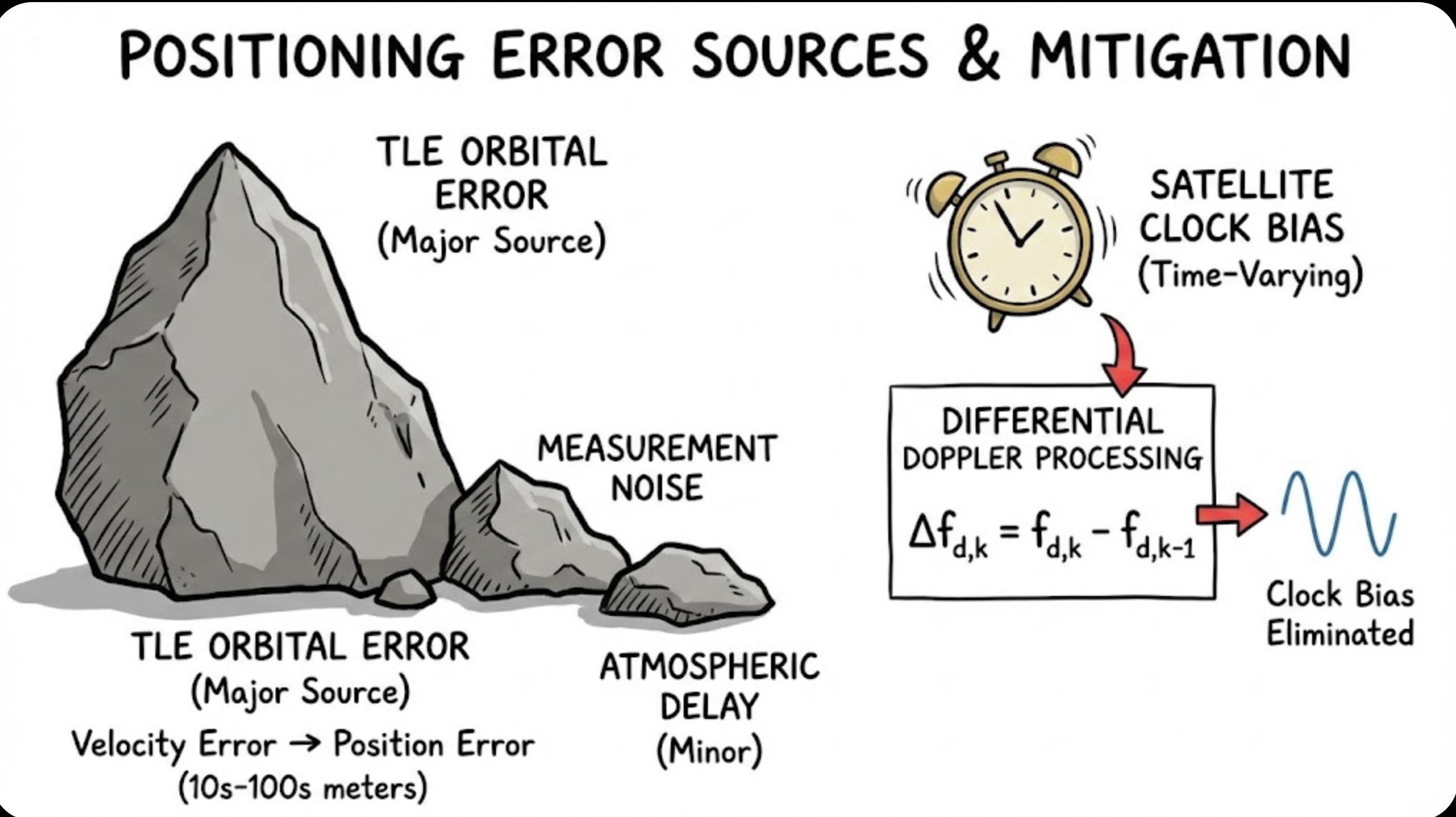
实测结论:TLE速度误差是单星多历元多普勒定位的**主要误差来源**,最终定位精度通常在**数十至数百米**量级,受限于TLE质量而非测量噪声。
而且,我们在前面的文章中提到过:星链这类具有自主变轨能力的星座,在变轨期间 TLE 会完全失效,这是多普勒定位在战时面临的最大不确定性。
### 3.3 卫星晶振频率偏差
由于功耗、体积和成本限制,像星链(Starlink)这样的低轨通信卫星通常不携带精密原子钟(如 GNSS 卫星的铷/铯钟),而是采用高稳定性的晶体振荡器:
UT Austin射电导航实验室对星链Ku波段下行信号帧时钟的实测研究(arXiv: 2501.05302)给出了迄今最权威的实测数据:
> **These traces exhibit clock drift magnitudes varying from 0.2 to 21.4 ppm, values characteristic of a TCXO at best and a basic quartz oscillator at worst.**[radionavlab.utexas](https://radionavlab.ae.utexas.edu/wp-content/uploads/qin_starlink_timing_properties.pdf)
这句话非常关键:
- **最优情况(0.2 ppm)**:对应高质量TCXO正常工作状态
- **最差情况(21.4 ppm)**:已接近普通晶振(XO)水平,说明GPS驯服出现失锁或异常
**实测范围:0.2–21.4 ppm,中位数约1–3 ppm量级。**
专为LEO设计的商业航天级TCXO:Q-Tech New Space系列的规格书上写了:
> **Key features of the New Space Series are radiation tolerance to 50 kRad(Si) TID… selectable frequency stability (±1 to ±3 ppm)**
以1ppm此作为保守估计代入计算:
Δf_clk = δφ̇_s × f_0 = 1×10^{-6} × 11.325×10^9 ≈ 11.3 kHz
对应等效径向速度误差:
Δv_clk = (c × Δf_clk) / f_0 = 300 m/s
这个量级远大于多普勒测量噪声,若不加处理将严重污染定位解。如何处理,取决于频率偏差的时间特性。
**情况一:钟频偏在过境期间近似为常数**
若 δφ̇_s 在10分钟过境内保持稳定,则它与终端本振频偏 δf_u 完全耦合,可以合并为单一未知量 δf_total:
δf_total = δf_u - δφ̇_s × f_0
方程组仍只有4个未知数,卫星钟频偏被最小二乘**自动吸收**,不增加求解复杂度,对定位结果无影响。这是最理想的情况。
**情况二:钟频偏存在时变漂移(实际情况)**
UT Austin射电导航实验室对星链卫星帧时钟的实测研究(2025年1月,arXiv: 2501.05302)表明:星链v1.0/v1.5卫星帧时钟存在**每秒一次的不规则跳变**,跳变幅度标准差 σ = 117 ns,最大值超过300 ns;在每15秒的FAI(固定分配区间)边界处有突变。
117 ns的相位跳变等效于约117 Hz的瞬时多普勒误差,远大于测量噪声,且**不可建立确定性模型**。
**工程处理方法:差分多普勒(相邻历元作差)**
对相邻历元的多普勒观测量作差:
Δf_d,k = f_{d,k}^{obs} - f_{d,k-1}^{obs}
若相邻两历元间隔很短(如1秒),卫星钟频偏变化量 Δ(δφ̇_s) 远小于其绝对值,差分后近似消除:
Δf_d,k ≈ - (f_0 / c) × [ r̂_k · ṙ_s^k - r̂_{k-1} · ṙ_s^{k-1} ] + Δε_k
差分多普勒方程中不含卫星钟频偏项,对帧时钟跳变具有良好鲁棒性。代价是:
- 测量噪声方差从 σ_f^2 增大为 2σ_f^2(噪声增加约3 dB)
- 终端自身的频偏未知量同时消除,未知数降为3个:(x_u, y_u, z_u)
- 需要至少4个差分历元(5个原始历元)才能求解
### 3.4 **大气延时**
电离层延时:
电离层延时和频率的平方成反比。Ku波段频率较高,所以信号受电离层影响极小(约为GPS L1频段的1/58),在定位中可以直接忽略。
对流层延时可通过成熟的标准模型进行有效修正,残差影响可忽略。
### 3.5 定位误差总结
单星多历元多普勒定位的精度受多种误差源影响,下表对其进行了系统梳理。
| 误差来源 | 等效多普勒误差 | 等效定位误差 | 可否消除 | 处理方法 |
| :--- | :--- | :--- | :--- | :--- |
| **多普勒测量噪声** | 0.1–1 Hz | 数米 | 部分 | 延长相干积分时间 |
| **TLE轨道速度误差** | ~38 Hz/(m/s) | **数十–数百米(主要项)** | 部分 | 使用精密星历(但商业星链不提供) |
| **卫星钟频偏(常数)** | ~11 kHz | 被吸收,无影响 | ✅ 完全 | 最小二乘自动吸收 |
| **卫星钟频偏(时变)** | ~117 Hz σ | 污染残差 | 大部分 | **差分多普勒**(相邻历元作差) |
| **对流层延时** | 等效<1 Hz | 可忽略 | ✅ | 标准模型(如Hopfield)修正 |
| **电离层延时(Ku波段)** | 约GPS的1/58,<0.1 Hz | 可忽略 | ✅ 天然小量 | 无需处理 |
> 在商业TLE数据条件下,单星多历元多普勒定位的精度上限约为数十至数百米,主要由TLE轨道速度误差决定,而不是测量噪声。
## 4. 适用场景与局限性
### 4.1 适用场景
单星多历元多普勒定位的核心价值在于其**极简的硬件要求**和**对单颗卫星的依赖**,使其在特定场景下极具吸引力:
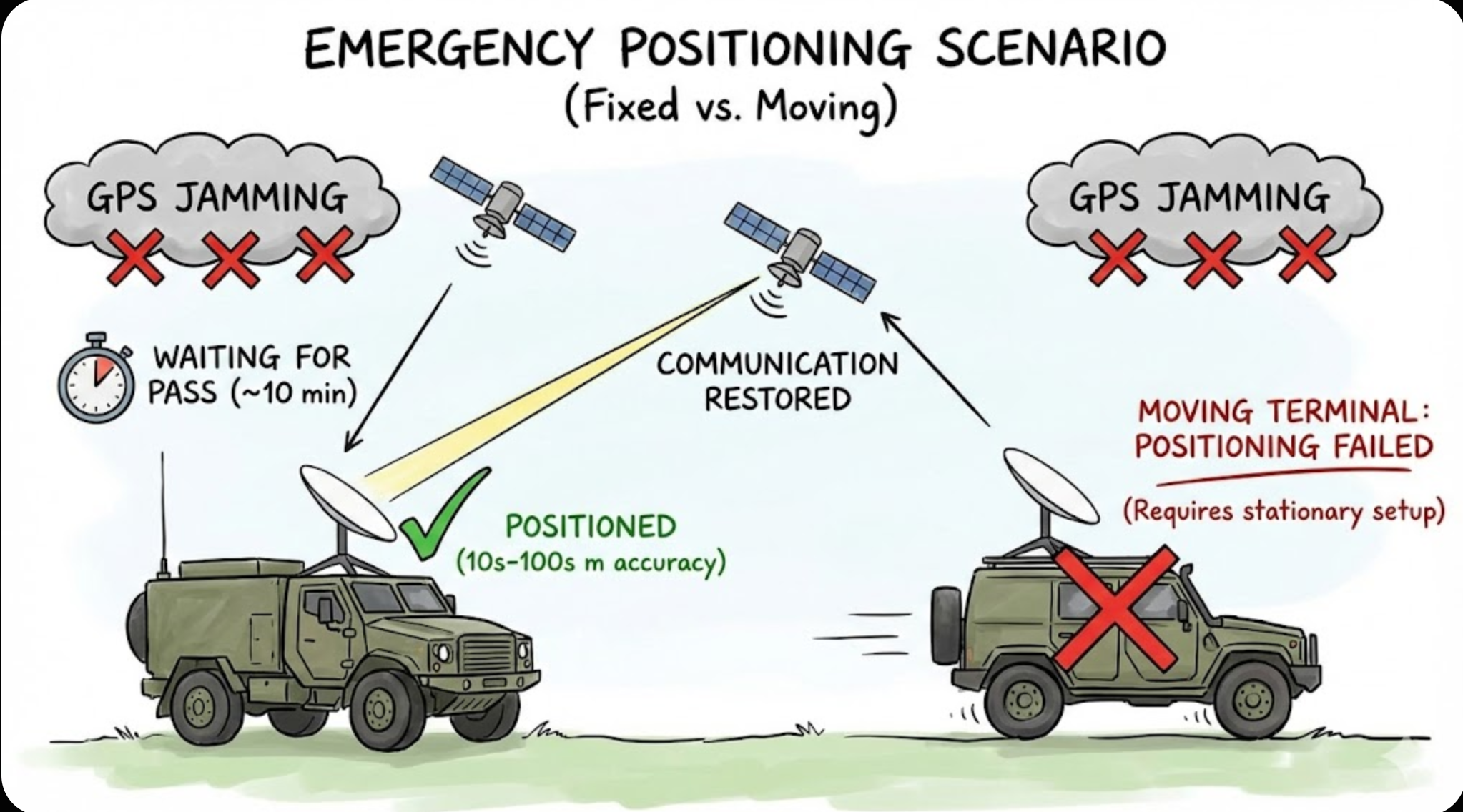
- **固定阵地应急定位**:在GPS被压制后,指挥所、炮兵阵地等固定设施可启动此模式。只需等待下一颗星链卫星过境(平均等待时间约10-15分钟),即可获得数十至数百米精度的位置信息,
- **驱动相控阵恢复通信**:获得粗略位置后,终端可驱动相控阵天线精确对准其他可见卫星,从而恢复下行数据接收能力。
### 4.2 局限性
该方法的局限性同样源于其基本原理:
- **仅适用于静止终端**:
推导中全程假设 r_u 为时间常数。终端一旦移动,位置未知数变为时变量 r_u(t),单星观测量无法约束,方程没法求解。
运动平台若要使用这个方法,必须引入IMU(惯性测量单元)提供运动约束,复杂度大幅增加。
- **定位时延长**:
必须等待整个过境弧段积累足够的几何多样性,无法实现实时定位,完全不适用于需要快速响应的机动平台或战术场景。
- **精度上限受限**:
在仅使用公开TLE的条件下,定位精度被限制在数十至数百米量级,无法满足高精度应用需求。
提升精度的路径是获取精密轨道数据(如通过参考站网络实时定轨)
## 5. 总结与展望
单星多历元多普勒定位是星链终端在GPS拒止环境下实现自主定位的**最简可行路径**:无需硬件改动,仅需固件层增加多普勒测量和最小二乘解算模块,即可在GPS完全失锁的条件下获得终端位置,进而恢复相控阵对星和通信链路。其核心限制在于定位时延(约10分钟)和精度上限(受TLE质量制约),决定了它只适合固定或低速平台的应急定位场景。
------
**本文留下一个工程问题待后续讨论:**
多普勒测量是否需要解调星链下行数据信息?如果不需要,接收机只需处理物理层的哪些信号成分?这一问题的答案,将直接决定星链终端实现自主定位在工程实现上的复杂度和可行性边界。我们将在下一篇文章中详细展开。
“通信与导航”公众号主页有技术文章的分类合集,感兴趣的朋友可以查询。
