
共计 5008 个字符,预计需要花费 13 分钟才能阅读完成。
# 星链下行链路信号分析:频段、体制、数据帧、同步、导频、捕获流程
SpaceX 的星链(Starlink)是低轨互联网卫星的领军者,但是官方从未发布过任何关于其下行链路信号格式、体制或协议的相关标准文档,对于通信工程师而言,这套系统曾是一个不折不扣的“黑盒”。
但技术圈从来不缺“硬核玩家”。以得克萨斯大学奥斯汀分校(UT Austin)的 Todd Humphreys 教授团队为代表的逆向工程专家,通过盲解调和高性能软件定义无线电(SDR)设备,成功“黑进”了星链信号的物理层,还原了其信号体制的轮廓。
本文基于从网络上搜索的这些前沿的逆向研究成果,从星链下行信号的频段划分、体制、调制方式、数据帧、同步、导频等维度,深度拆解星链下行链路的技术真相。
## 1. 频段和信道分配
星链的下行链路主要工作在 **Ku 频段(10.7 GHz - 12.7 GHz)**。2 GHz 的总带宽被划分为 8 个信道,每个信道宽度约为 **250 MHz**,其中信号的实际有效带宽约为 240 MHz,信道边缘留有 10 MHz 的保护带。
## 2. 信号体制
星链下行链路采用正交频分复用(OFDM)体制,这与 4G、5G 和 WiFi 所用的通信体制类似。
根据最新的研究成果(如 Qin 等人于 2025 年发布的分析),星链 Ku 波段下行信号的关键物理层指标如下:
| 参数名称 | 技术指标 | 定义/说明 |
| :--- | :--- | :--- |
| **信道带宽(B)** | **240 MHz** | 信号占用的有效频谱宽度,通常分配在 250 MHz 的信道间隔内。 |
| **子载波间隔(Δf)** | **234.375 kHz** | 相邻正交子载波之间的频率间隔。 |
| **FFT 规模(Nfft)** | **1024** | 用于生成 OFDM 符号的快速傅里叶变换点数。 |
| **符号长度(Tsym)** | **4.4 微秒(μs)** | 单个 OFDM 符号的持续时间(含循环前缀 CP)。 |
| **帧周期(Tf)** | **1.33 毫秒(ms)** | 信号帧的重复周期,对应 750 Hz 的帧速率。 |
| **调制方式** | **QPSK / 16QAM / 64QAM** | 根据链路质量自适应调整的幅度相位调制阶数。 |
在传统的 4G LTE 系统中,子载波间隔(SCS)仅为 **15 kHz**。而星链下行链路的子载波间隔为 **234.375 kHz**,大约是 4G 体制中子载波间隔的十几倍。之所以采用这么大的子载波间隔,一个重要原因是为了对抗低轨卫星极其严重的多普勒频偏。
星链卫星以约 **7.5 km/s** 的速度在地球上方飞行。即使地面终端是静止的,在工作频率约为 **12 GHz** 的 Ku 波段,这种高速运动产生的频移可达 **±300 kHz** 左右。
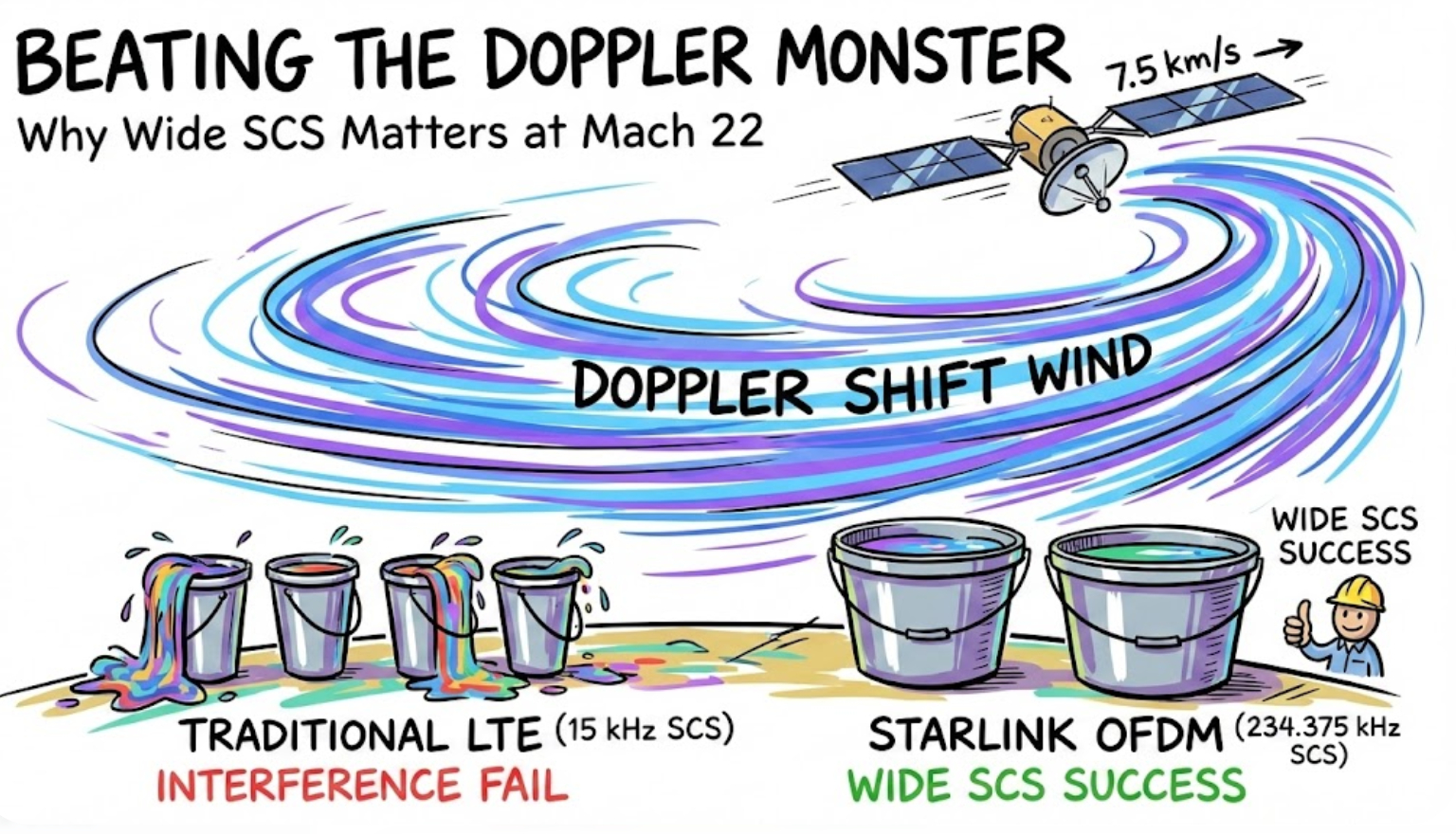
星链采用的是 **OFDM(正交频分复用)** 调制体制。
- **正交性要求**:OFDM 要求各个子载波在频率轴上严丝合缝地排列且互不干扰(即保持正交性)。
- **干扰产生(ICI)**:如果发生显著的频率偏移,原本整齐排列的子载波就会在频率轴上发生移动并相互重叠,引发严重的子载波间干扰(ICI),导致接收机无法正确解调数据。
为了降低频移的影响,工程设计上最直接的办法就是增大子载波间隔(Δf)。通过增大间隔,星链增强了信号对频率偏差的容忍度。
## 3. 数据帧
星链的数据帧是其通信的时序基准。每一帧的时长约为 **1.33 毫秒 (ms)**,这意味着卫星每秒钟发出约 **750 帧**。
一个完整的数据帧由大约 300 个(含循环前缀的)OFDM 符号组成;每个符号总时长约 4.4 μs,其中有效符号时长为 **4.266 µs**,循环前缀(CP)时长为 **0.133 µs**。
数据帧按照结构分为:同步头、参考信号、控制信号和数据载荷。
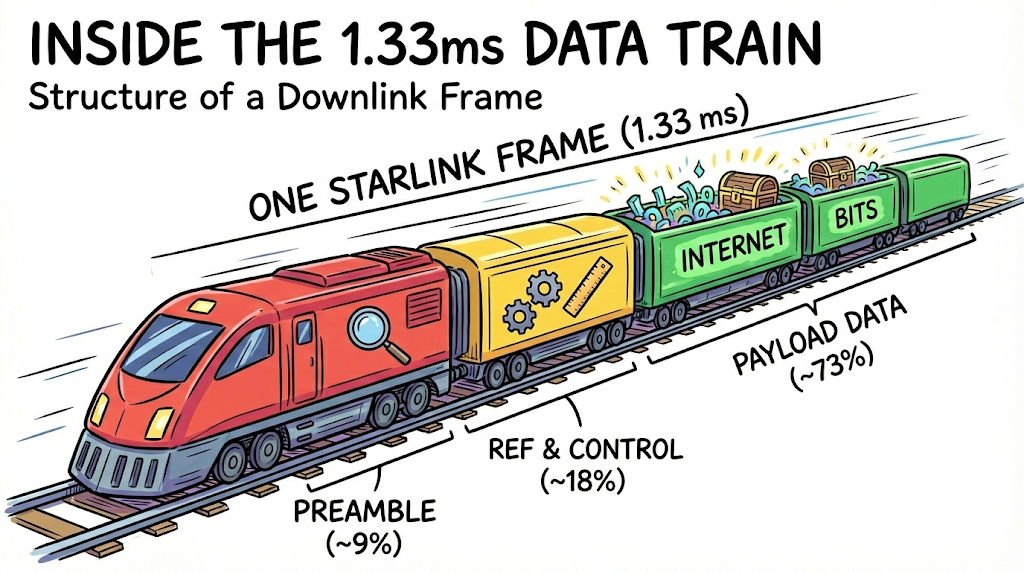
- **同步头 (Preamble)**:在每一帧的最前端,包含特定的固定序列,用于终端识别卫星。
- **参考信号 (Reference Signals)**:分布在帧的不同位置,帮助终端测量多普勒频移并修正相位。
- **控制信息 (Control Information)**:告诉终端接下来的数据是用什么调制方式(如 QPSK 或 64QAM)发送的。
- **数据载荷 (Payload)**:传输内容,承载用户的实际互联网数据,占据了帧的大部分空间。
| **组成部分** | **占用符号数** | **占比** | **主要功能** |
| --- | --- | --- | --- |
| **同步头 (Preamble)** | **26 个** | ~8.7% | 粗同步、频率补偿、帧起始识别 |
| **参考信号/控制信息** | **50–60 个** | ~18.3% | 调度指令、相位追踪、解调校准 |
| **数据载荷 (Payload)** | **210–220 个** | ~73% | 实际承载用户的互联网数据包 |
在普通 Wi-Fi 中,同步头通常非常简短。但星链需要这 26 个符号(主要包含 **主同步序列:PSS 序列**)来提供足够的冗余。因为终端必须在毫秒内,从复杂的电磁背景和巨大的多普勒频移中,精准计算出频率偏移量。这 8.7% 的“开销”是确保系统不掉线的必要成本。
## 4. 同步序列
星链下行信号**同步头 (Preamble)** 中的同步序列是终端在电磁噪声中精准“捕获”卫星信号的关键。这些序列不仅告诉终端“卫星在这里”,还提供了时间和频率校准的基准。
星链下行链路同步头采用**自定义长序列 OFDM 前导码**(基于 ZC 序列设计),包含两级相关结构:
- 第一级 **主同步序列(PSS)** 用于粗定时与大范围频偏捕获;
- 第二级 **辅同步信号(SSS)** 提供细定时与波束识别信息。
- **PSS(主同步信号)**:通常位于同步头的**第 1 个或前几个符号**。它的任务是“破冰”,必须在终端完全没对准频率时也能被识别。终端通过 PSS 确定帧的边界;通过寻找 PSS,终端就知道数据帧的开始位置。同时,通过峰值的偏移,终端能粗略估算出几百 kHz 的多普勒频移。
- **SSS(辅同步信号)**:紧随 PSS 之后(例如在第 2 或第 3 个符号)。在 PSS 确定了大致位置后,SSS 就能发挥作用。SSS 携带了物理层小区 ID(PCI)。SSS 帮助终端区分当前看到的是哪颗卫星或哪个波束,并修正剩下的细微相位偏差。完成这一步后,终端才能正确解调后续的控制信息。
## 5. 导频信号
在星链(Starlink)复杂的低轨卫星通信系统中,由于卫星相对于地面终端以约 **7.5 km/s** 的速度飞行,信号面临着严重的多普勒频偏。
导频信号也称为参考信号,是发射端和接收端“提前约定好”的已知信号,充当了链路中的“标准参照物”。
星链下行链路,在每个信道的中心附近,公开分析中常提到会看到一组很醒目的窄带“梳状”谱线:**9 个** 连续的、无调制的纯音(CW Tones),间距约 **44 kHz**。这些分量很可能被用作频率/同步参考,这就是星链的导频信号。
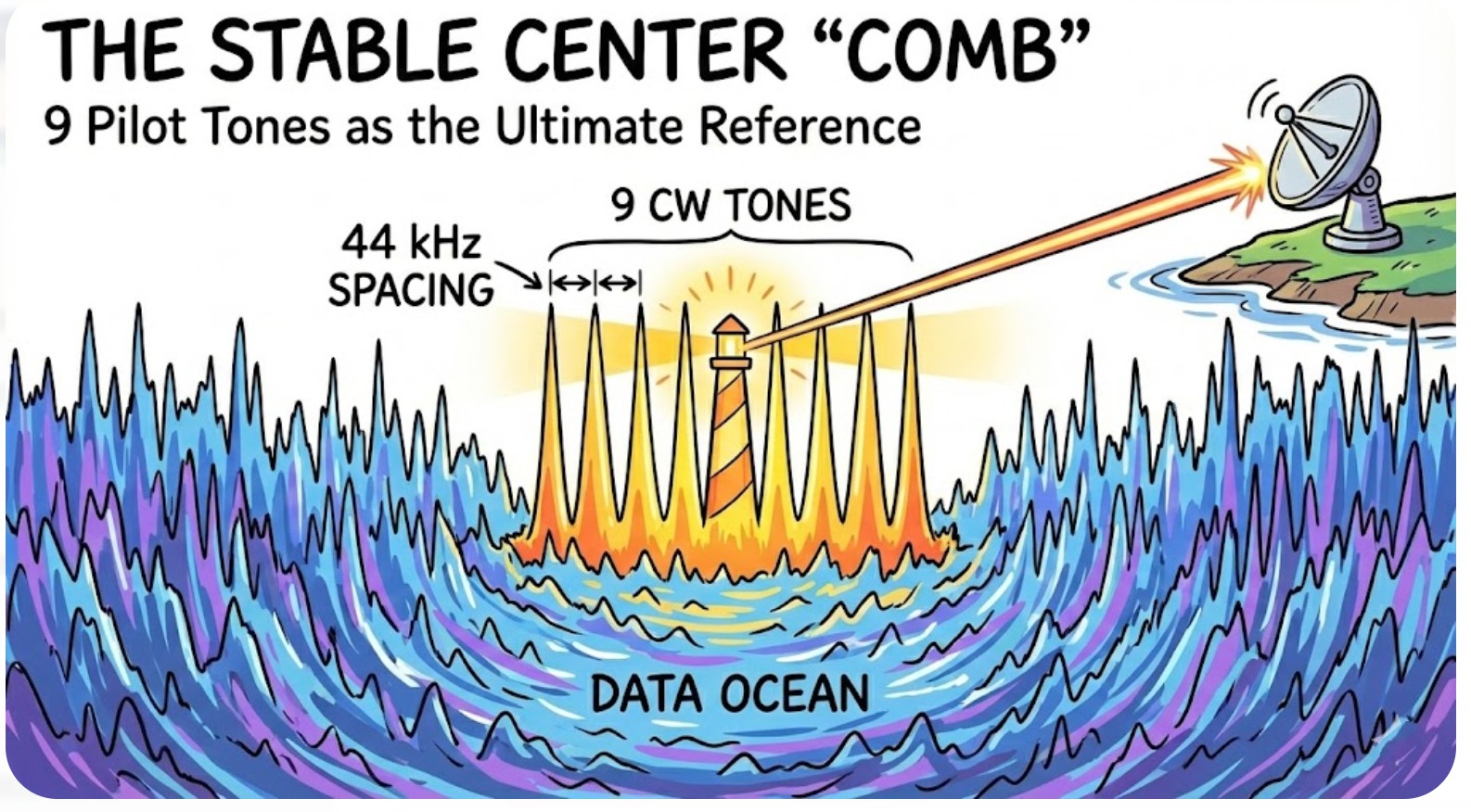
终端通过 FFT(快速傅里叶变换)在 250 MHz 频谱中搜索 9 个中心导频点的“梳状”特征。由于这 9 个点的相对间距(44 kHz)是固定的,即使发生 300 kHz 的多普勒偏移,终端也能识别并锁定其位置。
终端测量这些导频在连续两个时间点(符号)之间的相位旋转角度。利用公式:
> 相位差 = 2 × π × 频率偏差 × 时间间隔
(其中时间间隔通常取一个 OFDM 符号周期或其整数倍)
通过相位差可以推算出极微小的频率偏差。
通过这种方式,终端能够计算出当前的精确多普勒频偏,并预测未来的多普勒频偏。
下表展示了导频相位差与频率偏差的计算关系:
| 测量项 | 符号表示 | 数值示例 | 说明 |
|--------|----------|----------|------|
| 相邻符号间相位差 | Δθ | 0.1 弧度 | 通过 FFT 测量得到 |
| 符号周期 | Ts | 4.4 微秒 | 即 OFDM 符号长度 |
| 频率偏差 | Δf | ≈ 3.63 kHz | 由公式 Δf = Δθ / (2π × Ts) 计算得出 |
## 6. 终端如何利用同步序列和导频信号捕获卫星的
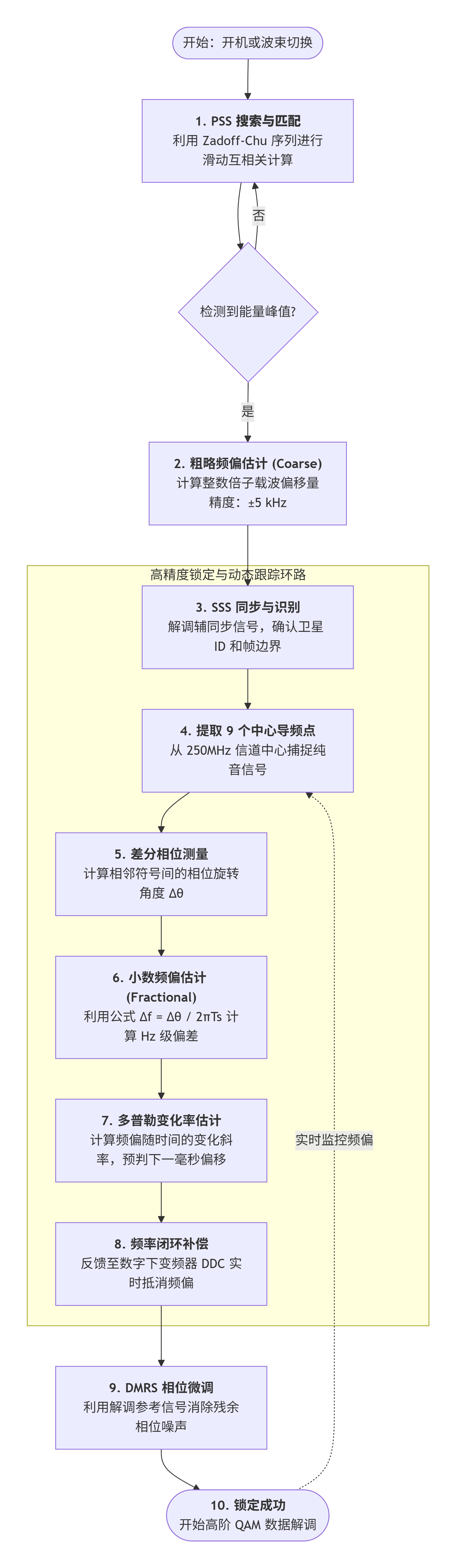
星链终端捕获卫星的过程可以分为 **粗同步(捕获)**、**精同步(测量)** 和 **闭环跟踪(维持)** 三个阶段。这三个阶段是如何使用同步序列和导频信号的,下面的流程图能说明。
在高速移动(如卫星与终端存在高速相对运动)场景下,克服严重的多普勒频移及其快速变化(多普勒率),实现对信号载波频率的超高精度(Hz 级)锁定,为高阶 QAM 数据解调提供稳定基础。
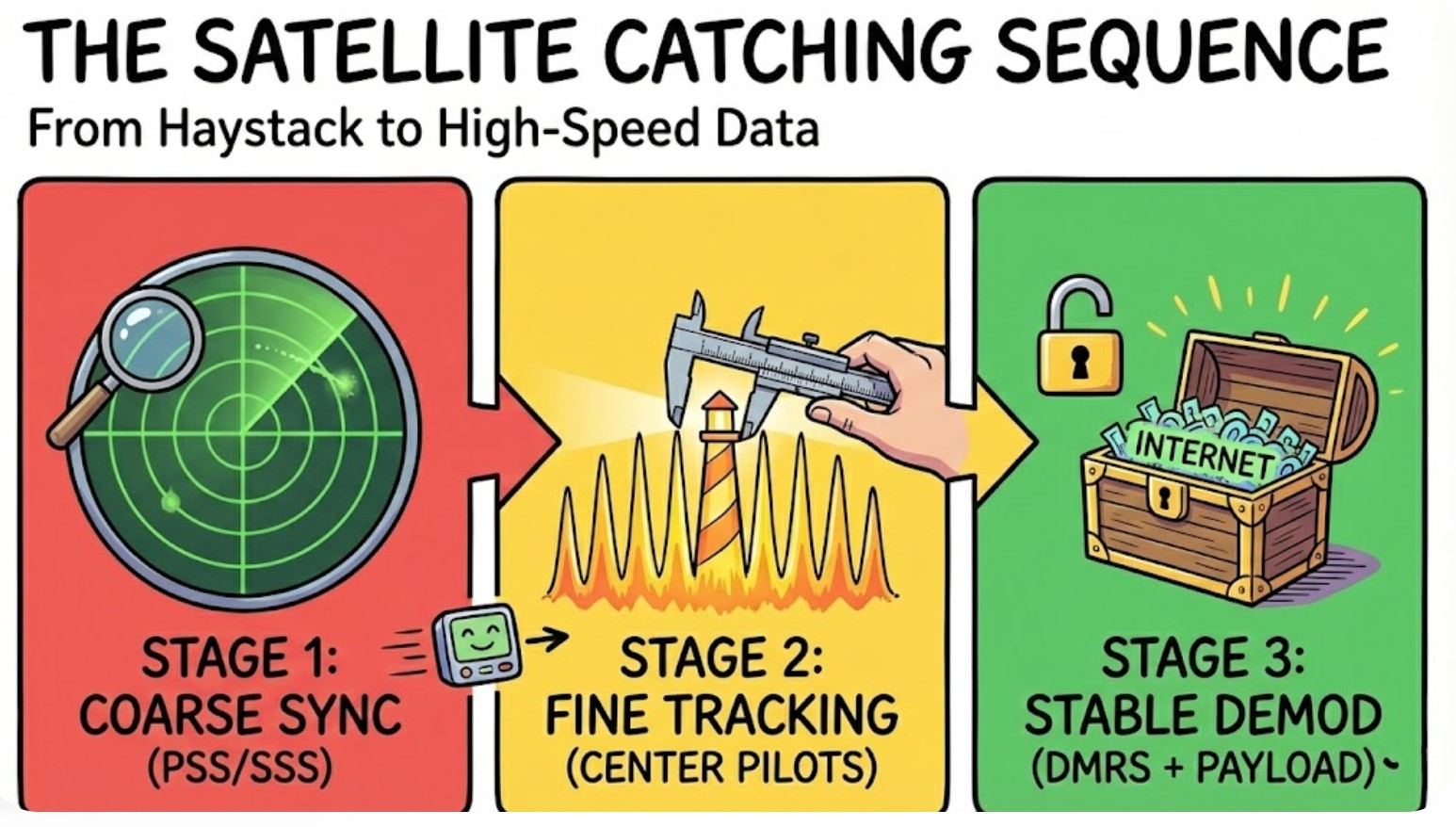
### 6.1 第一阶段:初始捕获与粗同步
此阶段的目标是找到信号并完成帧同步,获得初步的频率校正。
1. **PSS 搜索与匹配**:通过滑动相关法检测主同步信号。PSS 具有很好的自相关特性,便于在未知频偏下被检测到。
2. **粗略频偏估计**:利用检测到的 PSS,估计整数倍子载波间隔的大频偏(例如 ±5 kHz 量级),并进行初步补偿。
3. **SSS 同步与识别**:解调辅同步信号,获取卫星唯一 ID、帧定时等关键系统信息。至此,接收机与发射机在时域和小区身份上达成同步。
### 6.2 第二阶段:高精度频率锁定与跟踪环路
这是流程的核心,形成一个实时的闭环跟踪系统。
1. **提取中心导频点**:从宽带信道中心提取纯净、未调制的连续波导频信号。这为相位测量提供了“标尺”。
2. **差分相位测量**:测量相邻符号间导频的相位变化(Δθ)。这个旋转角直接反映了子符号周期内的累积频偏。
3. **小数频偏估计**:将相位差转换为精确的频率偏差值(频率偏差 = 相位差 ÷ (2 × π × 符号周期)),实现 Hz 级精度的估计。
4. **多普勒变化率估计**:分析频偏估计值随时间的变化趋势,预测下一时刻的频偏,以应对动态变化。
5. **频率闭环补偿**:将估计出的**总频偏(小数频偏 + 变化率预测)** 反馈至数字下变频器,实时调整本振,抵消接收信号中的频偏。
### 6.3 第三阶段:相位微调与数据解调
1. **DMRS 相位微调**:利用散布在数据中的解调参考信号,对信道进行更精细的估计,补偿残余的相位噪声和信道畸变,为解调做好准备。
2. **稳定解调**:完成频率和相位同步后,系统进入稳定状态,开始对高阶 QAM 数据载荷进行解调。同时,**跟踪环路持续工作**,监控并补偿持续的动态变化。
### 💡 结论
- **分层递进**:采用“**粗估 → 精测 → 预测 → 闭环**”的策略,逐步提升同步精度和动态适应性。
- **导频是关键**:专门设计的中心连续导频,是实现高精度相位/频率测量的基石。
- **闭环实时性**:整个跟踪环路在毫秒级甚至更短周期内运行,形成快速响应系统。
- **应对高动态**:明确的多普勒变化率估计环节,是针对卫星等高速移动场景的关键设计。
- **信号综合利用**:依次利用 PSS、SSS、专用导频、DMRS 等不同信号,完成从存在性检测到数据解调的全链路同步。
这种“粗细结合”的机制,让星链终端即使在极端天气或高速移动中,也能维持卫星互联网的稳定链接。
**码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。**
**大家有业务咨询,技术交流的,可以添加个人微信 15701068503。**
**“通信与导航”公众号主页有技术文章的分类合集,感兴趣的朋友可以查询。**
**长按关注我的公众号:**

